In de twintigste eeuw heeft de aanleg van het snelwegnetwerk tot grote suburbanisatie geleid. Zelfrijdend vervoer is waarschijnlijk de volgende grote technologiesprong wat transport betreft. Wat zijn de mogelijke gevolgen hiervan voor de bevolkingsconcentratie en de welvaart in Nederland?
In het kort
– Zelfrijdend openbaar vervoer trekt bevolking naar de grote steden en zelfrijdende privé-auto’s jagen mensen uit kleine steden.
– Een simulatie laat zien dat een combinatie van deze twee trends zorgt voor een bevolkingsconcentratie in de Randstad.
– De welvaartsbaten komen door het sneller en comfortabeler reizen, en voor een deel ook door het veranderde grondgebruik.
Zelfrijdend vervoer gaat veel veranderen in de reiservaring, woon-werkpatronen en het grondgebruik. Zelfrijdende auto’s (in dit artikel PAV’s – Privé-gereden Automatische Voertuigen) maken het voor de bestuurder mogelijk om het stuur los te laten en de reistijd te besteden aan andere activiteiten, zoals werk of ontspanning. PAV’s kunnen langere woon-werkafstanden en suburbanisatie tot gevolg hebben. Zelfrijdend openbaar vervoer (oftewel SAV’s – Samen-gereden Automatische Voertuigen) biedt snelle en goedkope gedeelde deur-tot-deur-ritten. SAV’s kunnen traditionele bussen, trams en sommige metrolijnen vervangen, met name in stedelijke gebieden waar het delen van ritten door de hoge bevolkingsdichtheid zeer efficiënt kan worden geregeld. Dit kan de aantrekkingskracht van steden vergroten en bijdragen aan een verdere bevolkingsgroei in stedelijke gebieden. De effecten van deze twee tegenovergestelde trends zijn al vaker in afzonderlijke studies behandeld (Heinrichs, 2016; Meyer et al., 2017; Litman, 2018; KiM, 2015; OESO, 2015). Maar de wisselwerking tussen de trends is nog nooit onderzocht. Inzicht in de ruimtelijke effecten van het zelfrijdend vervoer is relevant in het licht van lopende beleidsdiscussies over de stedelijke groei en het ruimtelijk beleid voor de lange termijn van de Nationale Omgevingsvisie (MinBZK, 2018; KiM et al., 2018).
Scenario’s en aannames
We beschouwen hier zes verschillende scenario’s (tabel 1), geïnspireerd door studies van het Kennisinstituut voor Mobiliteitsbeleid (KiM, 2015; 2017). De scenario’s verschillen in de mate van automatisering (hoog of volledig, conform niveaus 3/4 en 5 van SAE International, 2016), en in welke component – het ov, de privé-auto of een combinatie van beide – er geautomatiseerd wordt.
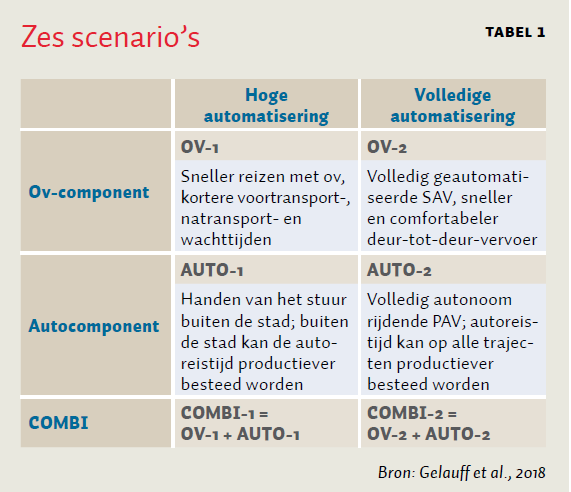
In het scenario Hoge automatisering rijdt het vervoer slechts op bepaalde trajecten zonder bestuurder. Auto’s kunnen autonoom rijden onder duidelijk omschreven omstandigheden, dus wel buiten de stad op wegen met gescheiden rijstroken, maar niet in de stad waar veel wisselwerking is tussen verschillende verkeerdeelnemers. Buiten de stad verbetert de reiservaring want men kan de reistijd productief besteden aan andere activiteiten. Zelfrijdende trams, metro’s en bus- of podcar-systemen bewegen zich op vaste routes in steden en tussen de belangrijkste knooppunten zoals stations en universiteitscampussen. ICT-applicaties ondersteunen passagiers met actuele, gepersonaliseerde reisinformatie. Lagere kosten maken een hogere ritfrequentie mogelijk; met name de wachttijd gaat omlaag. Net als bij het traditionele ov is geautomatiseerd openbaar vervoer relatief sneller en frequenter in steden dan erbuiten.
In het scenario Volledige automatisering kunnen voertuigen in alle verkeersomstandigheden zonder menselijke besturing rijden. Het transport ziet er dan heel anders uit dan nu. Een groot deel bestaat uit zelfrijdende van-deur-tot-deur-vervoersdiensten, geleverd door bedrijven die de voertuigen bezitten (KiM, 2015). Treinen en metro’s blijven alleen rijden op verbindingen met heel veel reizigers. Op alle andere verbindingen hebben SAV’s of PAV’s de bussen, trams en auto’s vervangen. Vergeleken met traditionele auto’s, bieden PAV’s een verbeterde reiservaring, omdat bestuurders de tijd in het voertuig kunnen gebruiken voor andere bezigheden. Een SAV biedt een veel sneller en frequenter transport dan het traditionele openbaar vervoer, vooral in dichtbevolkte gebieden. SAV’s worden niet beperkt door vaste tijden en routes, ze brengen reizigers rechtstreeks van het vertrekpunt naar hun bestemming en rijden alleen om als ze andere passagiers moeten ophalen of afzetten. Dergelijke omwegen zijn relatief kort, vooral in steden, waar vanwege de hoge bevolkingsdichtheid de passagiers met behulp van ICT-systemen zeer efficiënt aan de juiste SAV toegewezen kunnen worden (OESO, 2015).
LUCA-model en simulaties
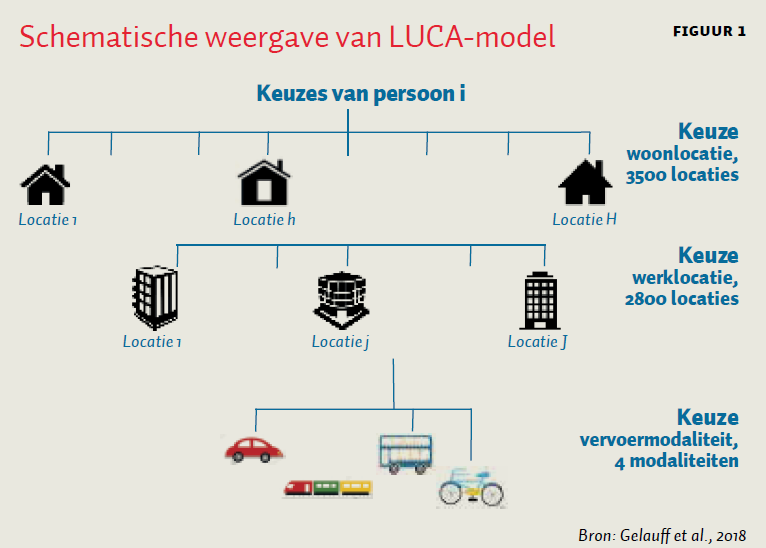
In LUCA, een ruimtelijk algemeen-evenwichtsmodel voor Nederland, berekenen we de ruimtelijke en welvaartseffecten van de scenario’s. LUCA modelleert hoe individuele werknemers hun woonlocatie, werklocatie en transportmodaliteit kiezen, en hoe het grondgebruik zich daaraan aanpast. Alle parameters zijn geschat op basis van actuele data over waar mensen wonen, werken en hoe ze forensen, dit alles in het basisjaar 2011. Het model onderscheidt ongeveer 3.000 woon- en werklocaties (viercijferige postcodes) en vier transportmodaliteiten: auto, trein, bus/tram/metro en fiets/wandelen. Figuur 1 geeft het model schematisch weer en Teulings et al. (2018), Gelauff et al. (2018), Ossokina et al. (2014) bevatten modelbeschrijvingen en -toepassingen.
Om de scenario’s uit tabel 1 te modelleren, passen we de inputs van LUCA aan. Hierin maken we gebruik van bestaande studies naar zelfrijdend vervoer (Gelauff et al., 2018). De autocomponent modelleren we door het gewicht waarmee de autoreistijd op het individuele nut drukt (VOT: value of time in de auto) te verminderen, omdat mensen deze reistijd productiever kunnen gebruiken. De VOT gaat omlaag: met vijf procent in Hoge automatisering (alleen buiten de stad) en met twintig procent in Volledige automatisering. De ov-component wordt in Hoge automatisering gemodelleerd door de voortransport-, natransport- en wachttijden van bestaande ritten te verminderen, en in Volledige automatisering door aan te nemen dat SAV’s deur-tot-deur-ritten maken die slechts twintig procent meer tijd kosten dan vergelijkbare, ongedeelde autoritten.
Het zelfrijdend vervoer heeft in LUCA meerdere uitwerkingen op mensen. Ten eerste gaat het nut omhoog door comfortabeler en sneller te reizen, en kiezen sommige mensen voor een andere vervoersmodaliteit. Ten tweede kunnen sommige gebieden door de veranderde bereikbaarheid meer of minder aantrekkelijk worden als woonlocaties. Dit leidt tot veranderingen in de spreiding en concentratie van de bevolking. LUCA berekent een nieuw (statisch) evenwicht op de grondmarkt, door grondprijzen en grondgebruik iteratief aan te passen totdat de vraag naar grond voor wonen in elke locatie weer gelijk wordt aan het aanbod ervan. Door het nieuwe evenwicht van het model met het oorspronkelijke evenwicht te vergelijken is het mogelijk om de welvaartseffecten van zelfrijdend vervoer te berekenen. De welvaartsbaten komen ten eerste voort uit sneller en comfortabeler reizen bij gelijkblijvende bevolkingsspreiding, en ten tweede uit relocatie van de bevolking en veranderingen in grondgebruik.
Resultaten
Eerst bespreken we de veranderingen in bevolkingsspreiding. De auto- en de ov- componenten hebben een tegenovergestelde uitwerking op de woonlocatiekeuze van mensen. Automatisering van het openbaar vervoer trekt bevolking naar de steden, met name naar de Randstad. Dit gebeurt vanwege efficiëntere ov-diensten in gebieden die al een hoge bevolkingsdichtheid hebben. Niet-stedelijke regio’s hebben daarentegen te maken met bevolkingsverlies, vanwege het vertrek van mensen naar de steden. Automatisering van privé-auto’s leidt tot suburbanisatie: steden verliezen bevolking aan de randgemeenten en de niet-stedelijke gebieden. Dit gebeurt omdat langere woon-werkafstanden acceptabeler worden. De combinatie van de twee componenten culmineert in een bevolkingsconcentratie binnen de al sterk verstedelijkte Randstad. Geïsoleerde steden buiten de Randstad verliezen bevolking, omdat ze door uitgestrekte en aantrekkelijke niet-stedelijke gebieden zijn omgeven en relatief beperkte stedelijke voorzieningen bieden. Figuur 2 geeft deze effecten weer voor de scenario’s Volledige Automatisering (OV-2, AUTO-2, COMBI-2). Regionale veranderingen in bevolking bedragen tussen de −3 en +3 procent. In de scenario’s Hoge automatisering zijn de effecten qua richting grotendeels dezelfde als in Volledige Automatisering, maar wel een stuk kleiner qua omvang.
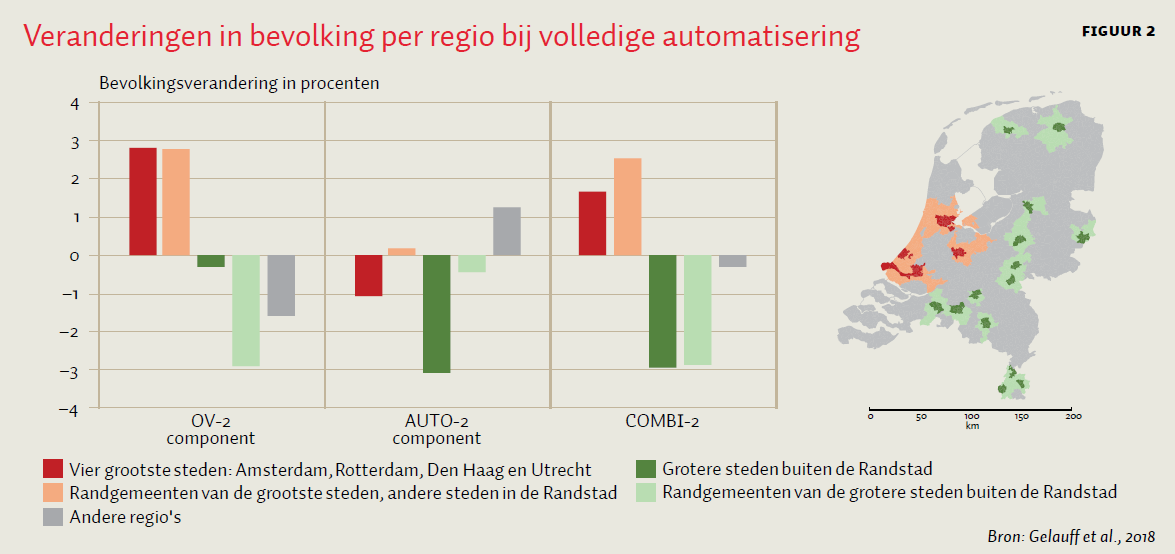
Om de effecten in perspectief te plaatsen, vergelijken we ze met de scenario’s voor de regionale ontwikkeling voor Nederland uit de studie Welvaart en Leefomgeving (CPB/PBL, 2015). In deze studie ligt de regionale bevolkingsgroei in 2012–2050 tussen −10 en + 30 procent, afhankelijk van de regio en de veronderstellingen over de economische groei en regionale concentratie of spreiding. De verwachting is dat steden het meest en niet-stedelijke gebieden het minst zullen groeien. Bevolkingsverschuivingen als gevolg van voertuigautomatisering kunnen de verschillen tussen de Randstad en de periferie versterken. Ze kunnen bijvoorbeeld de uitdaging in termen van bevolkingsgroei voor de vier grootste steden vergroten, en deze voor de steden buiten de Randstad juist verlichten.
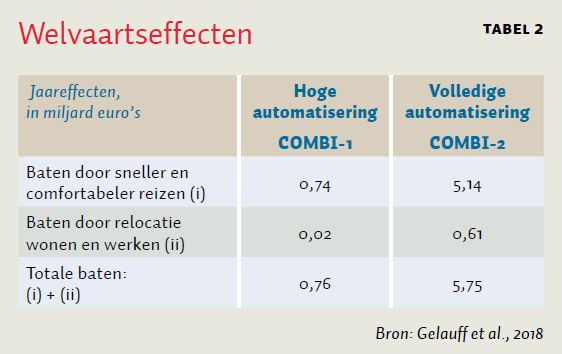
Nu besteden we aandacht aan de welvaartseffecten van zelfrijdend vervoer. LUCA berekent welvaartseffecten als de som van de veranderingen in het individuele nut van mensen, gewaardeerd in euro’s via lonen en grondprijzen. We onderscheiden de effecten van ten eerste een verbeterde reiservaring dankzij snellere en comfortabelere ritten met PAV en SAV (eerste-orde-effect); en ten tweede relocatie van de bevolking naar andere woon- en werklocaties (tweede-orde-effect). Door de verbeterde reiservaring in een PAV kunnen mensen verhuizen naar aantrekkelijke maar verder weg liggende niet-stedelijke gebieden waar ze altijd al wilden wonen. Ze kunnen ook een beter betaalde baan kiezen met een langere woon-werkafstand. Door de snelle en frequente SAV-diensten wordt het woon-werkverkeer binnen de stedelijke regio’s relatief veel sneller, en trekt dit mensen en banen naar de stad. Verandering in de woon- of werklocatie verhoogt het individuele nut en levert welvaartsbaten op. Verder leidt het toegenomen arbeidsaanbod op de meest productieve locaties tot een beter gebruik van de bestaande productiviteits- en agglomeratievoordelen, wat ook weer welvaartsbaten genereert. Ten slotte zijn er ook baten als gevolg van de grond(her)ontwikkeling. In het scenario Volledige automatisering (COMBI-2) bedragen de totale baten bijna zes miljard euro per jaar, oftewel 0,7 procent van het huidige bbp van Nederland, terwijl in het scenario Hoge automatisering de baten een stuk kleiner zijn (tabel 2). Het grootste deel van deze welvaartsverbetering vloeit rechtstreeks voort uit de snellere reistijden en het toegenomen reiscomfort. Een kleiner deel (tien procent in Volledige en drie procent in Hoge automatisering) ontstaat als gevolg van een verandering in woon- en werklocaties en grondgebruik. De grote transportverbeteringen in Volledige automatisering maken het mogelijk om grotere welvaartswinsten te behalen door van woon- of werklocatie te veranderen.
Beleidsimplicaties
In menig ontwikkeld land is in de afgelopen decennia de bevolking in de aantrekkelijke steden harder gegroeid dan in de rest van het land (Eurostat, 2016), en deze trend zal naar verwachting doorzetten (CPB/PBL, 2015). Onze simulaties laten zien dat automatisering van vervoer geen ondubbelzinnige tegenkracht biedt aan deze trend, zoals men tot nu toe dacht (Litman, 2018). Integendeel, zelfrijdend openbaar vervoer kan de trek naar steden juist versterken. De beleidsuitdagingen rondom de stedelijke groei blijven dus actueel, variërend van investeringen in huisvesting, voorzieningen en openbare ruimte, tot een toenemende segregatie tussen mensen die zich een woning in de dure steden kunnen veroorloven en degenen die dat niet kunnen. Automatisch rijden in steden zal ook nieuwe uitdagingen creëren, bijvoorbeeld op het vlak van regelgeving, veiligheid en infrastructuurinvesteringen (KiM et al., 2018), maar ook van gezondheid aangezien SAV’s op korte ritten een aantrekkelijk alternatief kunnen worden voor de fiets en zo het fietsgebruik verminderen (Gelauff et al., 2018).
De overgang naar volledig autonoom rijden kan vele jaren duren. In de transitiepaden van het KiM (2017) zal een volledig zelfrijdend vervoer in de stad naar verwachting pas rond 2070 ontstaan. De beschikbare overgangstijd kan worden gebruikt voor experimenteren en leren. Deze tijd is hard nodig want sommige beleidsmaatregelen – zoals het herontwerp, de planning en de uitvoering van infrastructuurprojecten – vergen flink wat jaren voorbereidingstijd en zullen de stedelijke structuur voor vele decennia bepalen. Zo stelt zelfrijdend vervoer beleidsmakers voor een dilemma. Aan de ene kant, gezien de grote onzekerheid en de geleidelijke overgang naar nieuwe technologieën, kan monitoren en afwachten de beste beleidsreactie zijn. Aan de andere kant is het vanwege de lange voorbereidings- en doorlooptijd van het beleid wellicht verstandig om niet te lang te wachten met beleidsaanpassingen.
Conclusies
We hebben de mogelijke effecten van twee trends in het zelfrijdend vervoer gesimuleerd met behulp van het Nederlandse ruimtelijke algemeen-evenwichtsmodel LUCA. De eerste trend – automatisering van auto’s, waarbij de reiservaring van de bestuurder verbetert – leidt tot suburbanisatie. De tweede trend – automatisering van het openbaar vervoer, waarbij er snelle en comfortabele, gedeelde deur-tot-deur-ritten mogelijk worden – resulteert in een toestroom van de bevolking naar de steden. Een combinatie van deze twee componenten leidt tot een concentratie van de bevolking in de grootste, meest aantrekkelijke steden, ten koste van de kleinere steden in de periferie.
De automatisering van het vervoer heeft een positief effect op de welvaart. In de eerste plaats ontstaan er baten door snellere en comfortabelere ritten. Dit is het overgrote deel van het welvaartseffect. Daarnaast zijn er ook baten omdat mensen optimalere keuzes kunnen maken wat betreft hun woon- en werklocatie. Deze bredere baten van zelfrijdend vervoer zijn significant; ze bedragen in onze simulaties tot tien procent van de totale baten.
De simulaties zijn geen voorspelling van de toekomst, die is hoogst onzeker. Niettemin biedt onze analyse een kwantitatieve indruk van twee mogelijke gevolgen van de automatisering die zeer relevant zijn voor het ruimtelijke beleid en het transportbeleid. Bijvoorbeeld, beleid dat uitsluitend zou uitgaan van de suburbanisatie als gevolg van voertuigautomatisering, zou ten onrechte geen rekening houden met een compenserende invloed van het geautomatiseerde openbaar vervoer wat betreft de aantrekkelijkheid van steden. En een te restrictief beleid omtrent grond(her)ontwikkeling zou ertoe kunnen leiden dat de baten van het zelfrijdend vervoer onvolledig kunnen worden benut.
De simulaties zijn nuttig in het licht van de lopende discussies over de groei en achteruitgang van steden, in het verleden, het heden en de toekomst. De meest invloedrijke technologische transportontwikkeling van de vorige eeuw – de aanleg van snelwegen – leidde tot suburbanisatie van de bevolking en banen (Baum-Snow, 2007; 2010). Voertuigautomatisering is misschien wel de volgende grote sprong in de transporttechnologie, en onze simulaties suggereren dat dit zou kunnen leiden tot een verdere bevolkingsconcentratie in de reeds sterk verstedelijkte gebieden. Dit kan extra uitdagingen voor beleidsmakers op lokaal en nationaal niveau teweegbrengen, omdat aantrekkelijke steden al veel sneller groeien dan andere gebieden.
Literatuur
Baum-Snow, N. (2007) Did highways cause suburbanization? The Quarterly Journal of Economics, 122(2), 775–805.
Baum-Snow, N. (2010) Changes in transportation infrastructure and commuting patterns in US metropolitan areas, 1960–2000. American Economic Review, 100(2), 378–382.
CPB/PBL (2015) Nederland in 2030–2050: twee referentiescenario’s. Toekomstverkenning Welvaart en Leefomgeving. PBL-publicatienummer 1689. Te vinden op www.cpb.nl.
Eurostat (2016) Urban Europe – Statistics on cities, towns and suburbs. Statistical book, te vinden op: www.ec.europa.eu/eurostat.
Gelauff, G., I.V. Ossokina en C.N. Teulings (2018) Spatial and welfare effects of automated driving: will cities grow, decline or both?, 30 juni. Paper te vinden op www.ossokina.com.
Heinrichs, D. (2016) Autonomous driving and urban land use. In: M. Maurer, J.C. Gerdes,
B. Lenz en H. Winner (red.), Autonomous Driving. Berlijn: Springer.
KiM (2015) Chauffeur aan het stuur? Zelfrijdende voertuigen en het verkeer en vervoersysteem van de toekomst. Den Haag: Kennisinstituut voor Mobiliteitsbeleid. Te vinden op www.kimnet.nl.
KiM (2017) Paden naar een zelfrijdende toekomst. Den Haag: Kennisinstituut voor Mobiliteitsbeleid. Te vinden op www.kimnet.nl.
KiM, BZK en TU/e (2018) Materialen van het seminar ‘Transportinnovaties en lange termijn omgevingsbeleid: implicaties voor de Nationale Omgevingsvisie’, 8 maart 2018, Den Haag Te vinden op www.kimnet.nl.
Litman, T. (2018) Autonomous vehicle implementation predictions: implications for transport planning, 24 juli. Victoria Transport Policy Institute. Rapport te vinden op www.vtpi.org.
Meyer, J., Becker, H., Boesch, P.M.K.W. Axhausen (2017) Autonomous vehicles: The next jump in accessibilities? Research in Transportatiion Economics, 62 80-91.
MinBZK (2018) Kabinetsperspectief NOVI. Den Haag: Ministerie van Binnenlandse Zaken en Koninkrijksrelaties. Notitie te vinden op www.rijksoverheid.nl.
OESO (2015) Urban mobility system upgrade:how shared self-driving cars could change city traffic. International Transport Forum. Rapport te vinden op www.itf-oecd.org.
Ossokina, I.V., H.L.F. de Groot, X. Ji en C.N. Teulings (2014) Agglomeratie, transportinfrastructuur en welvaart. CPB Policy Brief 2014/10.
SAE International (2016)Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles. Te vinden op www.sae.org.
Teulings, C.N., I.V. Ossokina en H.L.F. de Groot (2018) Land use, worker heterogeneity and welfare benefits of public goods. Journal of Urban Economics, 103, 67–82.
Auteurs
Categorieën







